

Chapter 6: Applications of Newton's Laws
Introduction
This chapter deals with applying Newton's Laws to two different situations: bodies in equilibrium and bodies not in equilibrium.
The techniques introduced in the preceding chapter involving free-bodies diagrams is used in tackling problems.
6.1 Equilibrium of a particle
A body in equilibrium (either at rest or moving with constant velocity) is acted upon by no net force: the vector sum of the forces acting on it must be zero according to Newton's first law of motion,
In component form, we have:

When solving equilibrium problems, one starts with free-body diagrams, finds the net forces along two perpendicular components then solve using the equation for the condition of equilibrium in component form.
6.2 Applications of Newton's Second Law
We can apply Newton's second law to bodies that are not in equilibrium.
When the vector sum (resultant) of the forces acting on a body is nonzero, it has an acceleration that is given by Newton's second law of motion,
When solving nonequilibrium problems, one identifies the forces acting on the body with free-body diagrams, finds the net forces along two perpendicular components, then solves using Newton's second law in component form.

6.3 Contact Forces and Friction
When an object rests or slides on a surface, the contact force exerted by the surface on the object can be represented in terms of components of force perpendicular and parallel to the surface as shown:
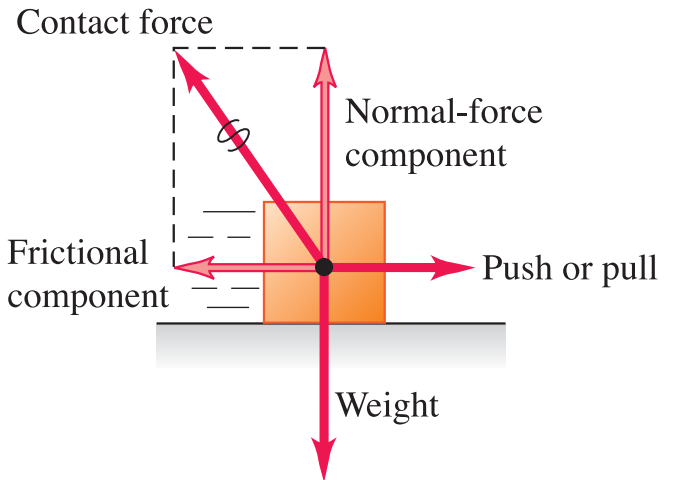
The component of the contact force between the two objects which is perpendicular to the surfaces in contact is the normal force.
The component parallel to the surface is the friction force.
When one object is sliding relative to a surface, the associated friction force is called a kinetic-friction force.
The direction of the kinetic friction force is always opposite the direction of motion and in some cases the magnitude of kinetic friction is generally proportional to the normal force between the objects.
The proportionality constant is the coefficient of kinetic friction which depends on the materials and the surfaces. The constant has no units.
Friction forces also act when there is no relative motion between the surfaces of contact. In this case the associated friction force is known as static friction.
The maximum static friction force that must be overcome for the object to just start to slide is generally proportional to the normal force.
The proportionality constant is the coefficient of static friction.
The force of static friction can have any magnitude between zero (when there is no other force parallel to the surface) and a maximum value given by:
In general,
Often the coefficient of static kinetic friction is usually less than the coefficient of static friction. As a result, when sliding starts, the friction force usually decreases, as shown below:

Other friction forces include viscosity, drag and rolling friction.
6.4 Elastic Forces
When forces are applied to a solid object, they usually deform the object.
An elastic force is a force that restores a body to its original equilibrium position after deformation.
For a spring, the elastic force known as spring force is approximately proportional to the distance by which the spring is stretched or compressed, as given by Hooke's law:

where k is the force constant, and x is the displacement of the spring from its equilibrium position.
The stiffer the spring, the higher the value of k and the more force is required for a deformation.
NB: Despite its name, Hooke's law is an approximate relation.
6.5 Forces in nature
Historically, forces have been classified into four categories. Two of which are familiar in everyday experience. The other two involve fundamental particle interactions and cannot be observed with the unaided senses.
The categories are strong, electromagnetic, weak, and gravitational.
Present-day research includes intensive efforts to create a unified description of forces in all these categories.